Case Study
Real-World Impact: Success Stories from Our Innovative Solutions
-
Overview
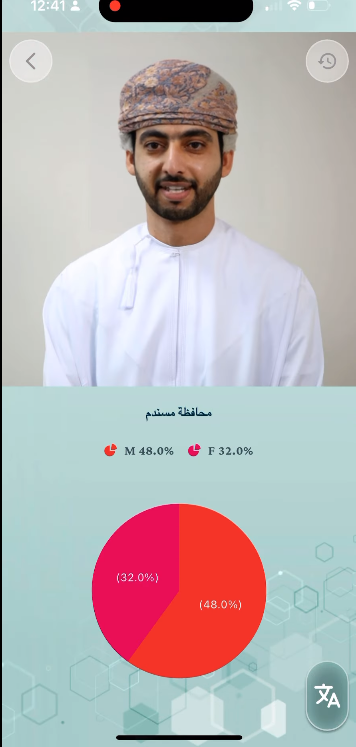
The project involved an in-depth analysis of Ministri’s polling data spanning six years to discern trends and patterns. Utilizing a variety of graphs, we visualized these insights for enhanced understanding and interpretation.
-
Model Development
Leveraging a preprocessed dataset and a robust infrastructure comprising a 4 x A10 GPU cluster, we developed a sophisticated predictive model. This model, with 7M parameters, employed time-series Transformer architecture. Its primary objective was to forecast the next-hour polling percentage, gender distribution, and age distribution across 11 Regions and 63 Wilayat.
-
Data Pipeline
A streamlined data pipeline was crucial for seamless data processing. We implemented Debezium, Kafka, and Pyspark to achieve this. Debezium facilitated the real-time streaming of data from the database, while Kafka ensured efficient data transmission. Pyspark played a pivotal role in data transformation, enabling us to preprocess and prepare the data for analysis.
-
Integration and Presentation
To democratize the insights gleaned from our analysis, we integrated graphical data generated by Pyspark with a talking Avatar. This fusion of visual data and interactive presentation was channeled through a mobile application. By employing this innovative approach, we aimed to make election insights accessible and engaging for the populace.
-
Conclusion
Through meticulous analysis, robust model development, and innovative presentation techniques, our project successfully illuminated election trends and facilitated informed decision-making. This endeavor underscores the power of data-driven insights in shaping the democratic process.
-
Overview
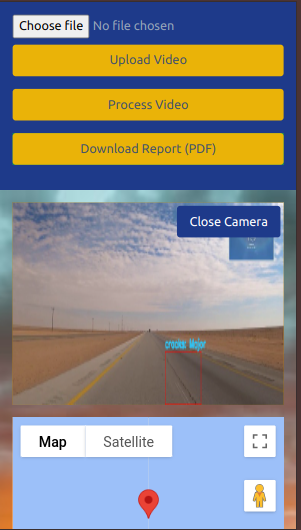
SmartInfraTech, a forward-thinking technology company, launched an innovative project aimed at revolutionizing road infrastructure management using AI-powered smart cameras. The project focused on detecting potholes, cracks, and missing lines on roads through advanced AI algorithms and providing real-time data to facilitate immediate action and maintenance.
-
Custom YOLOv8 Model Development
The project began with the selection and customization of the YOLOv8 model due to its superior object detection capabilities. This model was meticulously tailored to identify specific road anomalies such as potholes, cracks, and missing lines. A comprehensive video dataset, collected from real-world road conditions, was used to train the model, ensuring its effectiveness in various environments. Utilizing the Python programming language and leveraging deep learning libraries such as TensorFlow and PyTorch, the model was developed and fine-tuned to achieve high accuracy in detecting road damage.
-
Development of Django Application
A robust Django application was developed to manage and display real-time data from the smart cameras. This application was integrated with a Jetson Nano device, an edge computing platform attached to a car, which processed video feeds and detected road anomalies. The Django application featured live video stream displays from the Jetson Nano, GPS coordinate tracking, and integration with Google Maps for real-time location visualization. Detected anomalies such as potholes, cracks, and missing lines were highlighted on the video feed and marked on the map, providing a comprehensive view of the road conditions.
-
Data Annotation and Model Training
The project involved extensive data preparation, including the collection and annotation of video datasets essential for training the YOLOv8 model. Data augmentation techniques, such as rotation, scaling, and flipping, were employed to enhance the model's generalization capabilities. The training process was rigorous, involving multiple iterations and validation steps to ensure the model's reliability. The model's performance was validated using a separate dataset to ensure it could accurately detect road anomalies in diverse conditions, making it robust for real-world deployment.
-
Hardware and Software Integration
Integration of the AI algorithms with the Jetson Nano hardware was a critical phase. This involved optimizing the YOLOv8 model to run efficiently on the Jetson Nano, considering its limited computational resources. Extensive testing ensured seamless integration of the hardware and software components, allowing real-time processing and anomaly detection directly on the edge device. This phase also involved collaboration with hardware engineers to ensure compatibility and optimal performance, facilitating smooth operation in the field.
-
Performance Optimization
To meet the stringent performance requirements, the algorithms were optimized for efficient use of computational resources. Techniques such as model quantization were implemented to reduce the model size and enhance inference speed, ensuring that the edge device could process data in real time. Edge computing strategies specific to the Jetson Nano were applied, maximizing its processing capabilities while maintaining high accuracy. Continuous performance testing was conducted to validate the effectiveness of these optimizations.
-
Documentation and Reporting
Comprehensive documentation of the development and deployment processes was maintained throughout the project. This included detailed descriptions of the AI algorithms, training methodologies, and integration steps, ensuring that all aspects of the project were well-documented. Regular progress reports and comprehensive documentation were provided to project stakeholders, ensuring transparency and alignment. This documentation served as a valuable resource for ongoing maintenance and future enhancements of the system.
-
Conclusion
The deployment of the AI-powered smart cameras significantly improved road infrastructure management for SmartInfraTech. The system's ability to detect potholes, cracks, and missing lines in real-time allowed for prompt maintenance actions, enhancing road safety and reducing long-term repair costs. The integration of GPS data provided precise location information, streamlining the repair process and ensuring efficient resource allocation.